
五一假期,信息技术学院协同感知实验室的灯光却彻夜未熄。
从5月1日到5月5日,由苏雨蒙、周棒、王兴盛、韩庚组成的团队,完成了一项看似不可能的任务:从零机械组装、全栈代码调试部署、自主建图导航,成功打造出一台基于ROS2与PX4的自主导航阿克曼小车,在图书馆前完成了自主导航的验证。
这台小车能4天1夜从散件到自主导航功能的实现,靠的是实验室长期攒下的工程调试经验,也离不开建桥工科生那股从底层硬件到上层导航、一步步按系统工程逻辑往下推的科班素养。

图1:假期第一天,阿克曼小车散件

图2:假期最后一天,小车自主导航功能测试
底盘篇
时间倒回假期第一天,摆在团队面前的是一堆刚拆封的散件:转向、悬挂、减速器、轮毂电机、伺服电机、控制器、驱动器......由于是实验室新款车型,没有经验可循,团队必须自己摸索硬件组装。从车架拼接、转向校准到传动链路调试,整车反复拆装不下十次。导航测试中发生过碰撞,转向羊角又变形,不得不拆下锤正加固、重新装回。正是这种反复拆装与修正,让底盘在后续测试中逐渐趋于稳定。

图3:修复因调参碰撞变形的转向羊角
驱控篇
动力部分采用轮毂电机后驱方案,转向选用CAN总线伺服控制。这也是调试中最棘手的一环:PX4内部为DroneCAN,而伺服电机为原生CAN,两者不兼容,需要在中间进行协议转译。团队此前没有CAN设备调试经验,从接线、终端电阻匹配到帧解析,基本都是边学边调。为了在有限时间内走通链路,大家借助AI Coding辅助代码生成与排查,最终打通了飞控到转向电机的完整数据通路。

图4:草坪前规划航线测试
通讯篇
在通信方面,团队没有使用PX4原生的Offboard模式,而是直接采用了全新的PX4 ROS 2 Interface Library。相比旧有的Offboard接口需要心跳包维持连接、指令类型较为单一,新的接口库原生支持多类型指令的并行下发和传感数据的实时回传,在实际场景下灵活性更高。
这套通讯方案还具备跨平台迁移能力。PX4是无人机、无人车船等领域的成熟飞控,ROS2的分布式消息机制又让驱控与导航栈可灵活解耦。只需更换运动学模型和底层执行器接口,即可使用同一套通讯方案来实现机器人的自主导航,如实验室中适配上述方案的无人机、差速无人车等,如下图。

图5:实验室四旋翼无人机
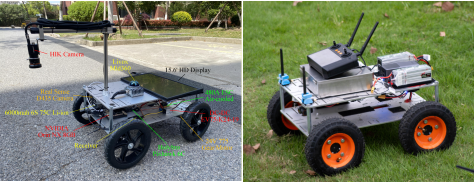
图6:实验室差速车
3D自主导航篇
上层导航整体运行在ROS2框架内,采用3D激光雷达作为主传感器,核心基于dddmr_navigation方案搭建。dddmr_navigation是一套面向非平坦地形的3D自主导航框架,与传统2D导航栈不同,它直接处理三维点云,能够同时完成机器人的位姿估计和场景三维地图构建,对室外起伏路面、斜坡、台阶边缘等复杂地形有更强的感知能力。
此外,团队在导航栈中的局部规划器部分做了修改适配,使路径规划更符合阿克曼底盘的运动特性。从雷达上第一个点云落到地图中,到小车在图书馆门前平顺绕开障碍物完成航点跟踪,这套3D导航栈才算是真正落了地。

图7:自主导航功能调试
通宵调试
由于核心器件中途到货延误,原本紧凑的工期被进一步压缩。在最后的关键节点,团队开启了“狂飙”模式。成员们一起通宵达旦地往前赶进度。夜深人静时,实验室里只有键盘敲击声和电机偶尔的转动声。在将雷达功能包成功部署,并调通复杂的ROS2导航栈后,时间已悄然来到凌晨。为了验证真实场景效果,团队将测试场搬到学校图书馆门前。
最终,小车在图书馆前,能够自主完成路径规划、动态避障和航点跟踪。

图8:图书馆前自主导航功能测试
当小车第一次通过自主规划路径稳稳绕过障碍物时,那一瞬间的兴奋驱散了连日来的疲惫。“相当满意了!” 这条深夜发出的朋友圈,记录了他们最真实的喜悦。
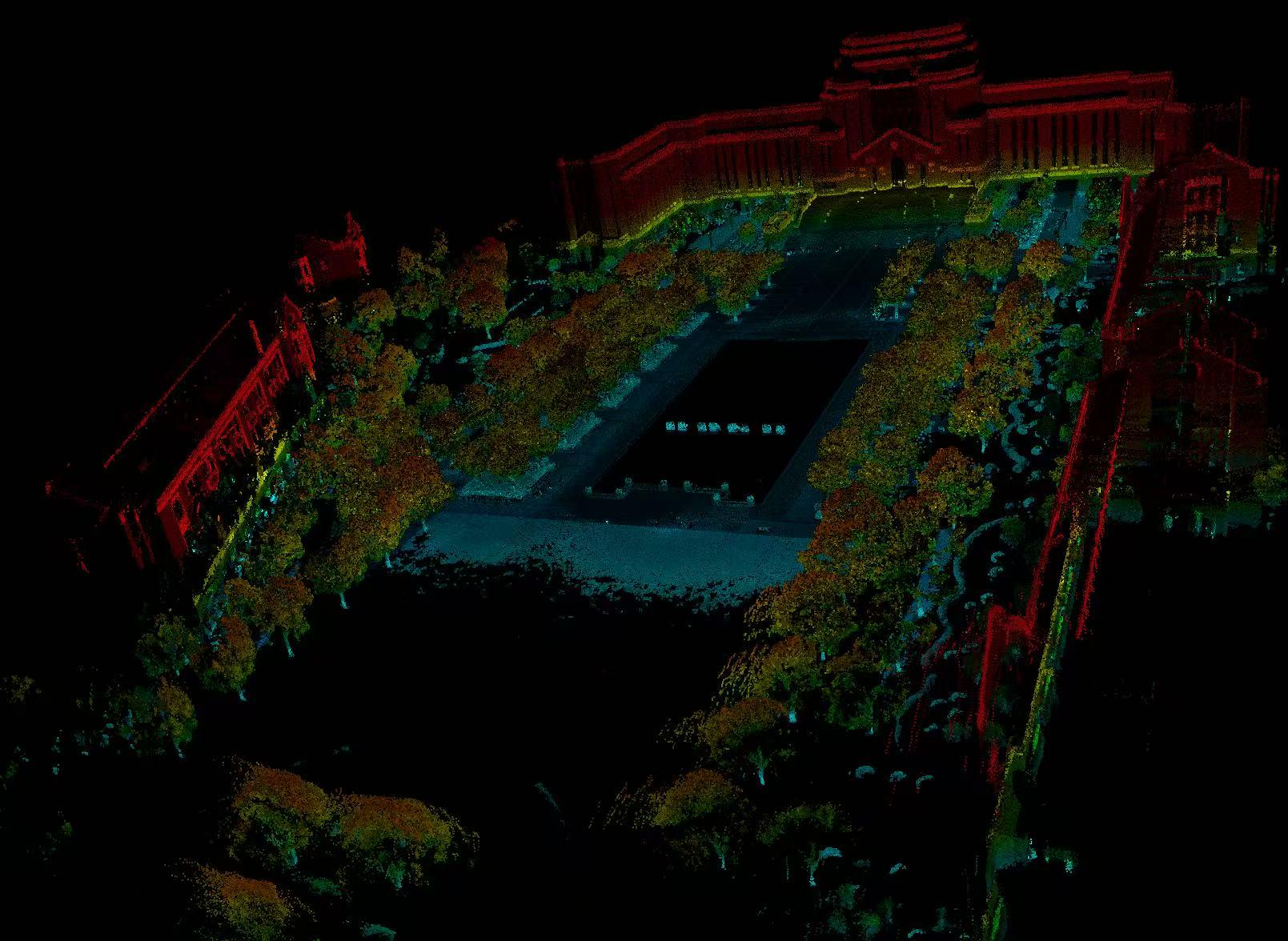
图9:雷达实时扫描生成的三维点云地图

图10:融合相机数据的雷达实时扫描三维点云地图(白天)
回顾这4天1夜,团队并非简单复用开源方案,而是连续跨过了几道实打实的技术关口:在PX飞控与伺服电机之间使用了一套全新的DroneCAN到原生CAN的协议转译方案,打通了从PX4到CAN外设的完整控制链路;放弃传统Offboard模式,改用PX4 ROS 2 Interface Library构建了多指令并行、多传感回传的通信架构,为后续多车机分布式通讯打下基础;在dddmr_navigation导航栈中针对阿克曼底盘做了运动学适配,解决了纯偏航率闭环控制在零速/极低速场景下的天然缺陷,使导航方案与之适配。
这台小车现阶段跑通的,是一套经典的“感知—决策—规划—控制”分层导航框架。这套框架的好处是结构清晰、模块可解释,各层可以独立调试和优化,目前在相对规整的场景中已经能够稳定完成自主导航任务。但它的局限也很明显:每一层之间靠人工设计的规则和参数衔接,面对动态多变、高度复杂的真实环境时,系统的适应性和鲁棒性会明显下降。
后续团队将依托现有成熟底盘结构和通信架构,逐步向强化学习、大模型VLA等端到端前沿方向扩展。这些方向的推进,最终让机器人从“按规则执行”走向“在环境中学会应对”。
协同感知实验室(信息学院118室)专注于机器人相关技术深耕,目前团队深耕ROS2+PX4技术链路,并计划逐步探索多机协同、强化学习、VLA大模型等前沿研究方向。我们诚挚欢迎对机器人底层控制、自主导航与具身智能抱有热忱的同学一同交流探索。无论你偏爱硬件调试、钻研底层架构,或是深耕软件算法、探索智能模型,在这里都能找到适配的研究方向,在实操试错中积累经验,结伴共同深耕成长。
